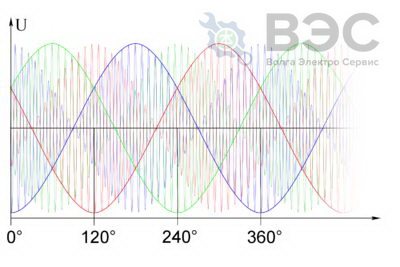
Резольвер что это такое
Волга Электро Сервис
Ремонт промышленной электроники
Ремонт электро двигателей
+7 927-718-44-77

РФ г.Тольятти ул.Фрунзе 2А
НАВИГАЦИЯ  НАВИГАЦИЯ
НАВИГАЦИЯ 
Вместе с этим читают:

Ремонт электродвигателей.

Ремонт резольверов.

Ремонт электродвигателей SIEMENS 1FT6 1FK7
Наша компания занимается ремонтом энкодеров резольверов более 15 лет. За это время был полностью изучен принцип работы резольверов. Богатый опыт, в этом направлении, помогает нам разрабатывать схемы управления и диагностики для всевозможных проверок резольверов после ремонта. Как происходит установка резольверов на двигатели Вы можете перейдя по ссылке:
Резольвер принцип работы.
Резольвер — это вращающийся трансформатор, принципом работы является преобразование угла поворота в электрическое напряжение. В качестве измерения рассматривается амплитуда напряжения, которая пропорциональна углу, или является функцией синус (косинус) угла.

Резольверы широко распространены в промышленном оборудовании и используются в качестве датчиков обратной связи с установкой на двигателе. С помощью их принципа работы определяется актуальное положение ротора электродвигателя, с помощью этого можно определить например — скорость вращения вала двигателя. В разработке резольверов применяются разные принципы технических решений. Ввиду этого, работа резольверов и их электрических схем может значительно отличаться. Но обо всём по порядку.
Резольвер – это, прежде всего трансформатор. Значит, во время работы резольвера между его обмотками наводятся ЭДС, амплитуда и фаза которых, зависит от положения ротора резольвера, на котором расположена одна (или несколько) из обмоток рассматриваемой нами электрической микромашины переменного тока (то есть резольвера).
При работе резольвера, в пределах одного, полного оборота ротора, форма амплитуд ЭДС вторичных обмоток резольвера однозначно(!) характеризует угол поворота ротора. Данное утверждение верно только для резольверов с одной парой полюсов. Именно поэтому однопараполюсные резольверы наиболее рапостранены. Это основное значение в функционировании датчика обратной связи двигателя и его краткое описание принципа работы.
Такой датчик, конструктивно, очень похож на двигатель с возбуждаемым (переменным током) ротором. Например резольвер resolver TS2651N141E78 производства TAMAGAWA.
Описание работы резольвера ts2651n141e78
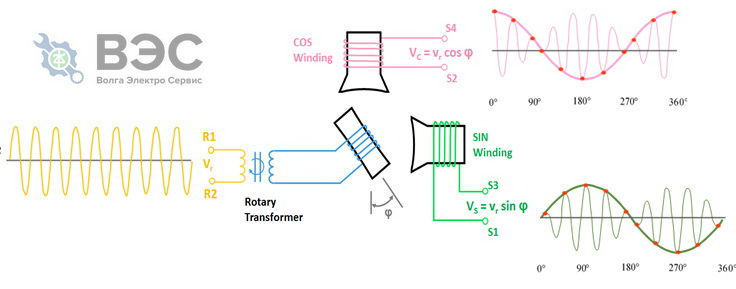
Для работы резольвера, например resolver TS2651N141E78, необходимо возбуждение его первичной обмотки. Данную задачу выполняет электронная схема. Активные компоненты схемы создают колебания на первичной обмотке, так называемой обмотке возбуждения. Частота колебаний заранее известна (указывается в паспорте резольвера) и применяется для расчётов. Основной принцип работы электронной схемы, к которой подключены вторичные обмотки, является преобразование сигналов. Наиболее часто данную работу выполняет аналого-цифровой преобразователь, при участии операционного усилителя.
Электронная схема для работы резольвера расположена отдельно и подключена через кабель, то есть, внутри двигателя нет полупроводников, что является ключевым преимуществом резольвера как технического решения в качестве датчика обратной связи.
Всё это в целом выглядит идеальным инструментом в тематических аспектах разработки промышленного оборудования. Вращающаяся часть резольвера крепится к валу двигателя. Статичная его часть установлена на статоре двигателя.
Существуют различные комплектации резольверов. Рассмотрим, подробно наиболее распространённый вариант:
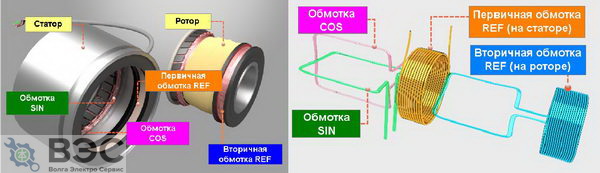
Первичная обмотка (REF) , вторичная (SIN) и вторичная (COS) расположены в статорной части, а вторичная обмотка (REF) – в роторной части резольвера, последняя – вращается в одной плоскости с первичной обмоткой REF. Из-за этого напряжение на вторичной обмотке REF всегда имеет одинаковую амплитуду независимо от угла поворота роторной части. Далее сигнал со вторичной обмотки REF поступает на обмотку возбуждения (она является первичной обмоткой для SIN COS),передавая им ЭДС. Ключевым моментом в таком подходе является расположение в пространстве обмоток SIN и COS. Они должны быть расположены точно перпендикулярно под углом 90 электрических градусов по отношению друг к другу. При таком расположении вторичных обмоток SIN и COS величина ЭДС (Vs) на обмотке SIN будет составлять произведение напряжения REF (Vref) и синуса угла. Для косинуса функция идентична.
Usin = Uref * SIN ( Ф ); Ucos = Uref * COS ( Ф );
Угол резольвера можно вычислить:
SIN(Ф) * SIN(Ф) + COS(Ф) * COS(Ф) = R * R. Где R – значение максимальной амплитуды для SIN и COS.
Далее зная R можно легко вычислить угол Ф через arcsin.
Так, как трансформатор является обратимой электрической машиной, то возможно его использование при трансформации сигналов в обратную сторону. То есть возбуждаемый сигнал можно подавать на обмотки SIN и COS. Сигнал SIN должен быть сдвинут на 90 электрических градусов по отношению к сигналу COS. Для определения позиции положения ротора резольвера необходимо измерять величину амплитуды и фазу сигнала на обмотке REF.

На двигателях LENZE часто установлен Резольвер TS2651N141E78. Существуют разные модификации резольверов. Например на рисунке ниже изображены статор и ротор резольвера TS2620N21E111 серии BRX производства TAMAGAWA.
На двигателях SIEMENS (например 1FK7042-5AF71-1TH0) часто устанавливаются резольверы resolver tyco V23401-T2629-E202 или (1FK7015-5AK71-1SA3 resolver LTN RE-15-4-S03). При этом если на бирке мотора указано resolver p=1, то это значит что на моторе установлен резольвер с одной парой полюсов. Обозначение resolver p=3 говорит о том, что резольвер имеет три пары полюсов. В большинстве случаев для работы резольвера, частота колебаний на первичной обмотке варьируется от 1000Гц до нескольких сотен кГц. Наиболее распространены резольверы с рабочими частотами 4 и 10кГц.
Коэффициент трансформации большинства резольверов равен 2. Это значит что амплитуда сигнала на обмотках SIN и COS будет в 2 раза ниже амплитуды поданной на обмотку REF. Реже встречаются резольверы с коэффициентом трансформации 3. В среднем (на резольверах сервомоторов), для возбуждения первичной обмотки требуется мощность порядка одного Ватта. Колебания создают транзисторы, управляющий сигнал для них может быть спроектирован как в виде схемы генератора импульсов, так и использоваться сигнал управления от микроконтроллера.
Сигналы с обмоток синуса и косинуса поступают на аналоговые цепи преобразования. В подавляющем большинстве случаев, для данных задач, используются операционные усилители. Преобразованный сигнал передаётся на АЦП. В результате программисту доступна точная информация о физическом положении ротора в цифровом виде.
Существуют готовые решения для создания схем подключения резольверов. Достаточно часто можно встретить схемы на базе специализированных микросхем AD2S90 и AU6802N1. Купить такие микросхемы можно во многих интернет-магазинах.
Резольвер очень надёжный датчик положения. Поэтому его активно используют в разных приложениях промышленности. В зависимости от задач, требуемое разрешение и точность может варьироваться от точного, до умеренного и грубого результата измерения. Например, в станках ЧПУ необходимы точные значения положения вала серводвигателя, а в промышленных стиральных машинах будет достаточно и грубых.
Бывает, что в работе серводвигателей возникают проблемы. Зачастую это связано с датчиком положения – резольвером. Для того чтобы произвести ремонт резольвера необходимы отработанные методики по перемотке и настройке, а также специфические инструменты и специально обученные специалисты. Сервисный центр ООО «Волга Электро Сервис» располагает всем необходимым для того чтобы быстро и качественно восстановить работу неисправного резольвера.
 +7 927 718-44-77
+7 927 718-44-77  +7 8482 55-77-22
+7 8482 55-77-22 volgaelectroservice@mail.ru
volgaelectroservice@mail.ru РФ г. Тольятти, ул. Фрунзе 2А
РФ г. Тольятти, ул. Фрунзе 2А Пн-Пт 9:00 — 18:00
Пн-Пт 9:00 — 18:00
Все материалы на сайте защищены авторским правом.
При размещении материалов с нашего сайта, ссылка на источник обязательна.
Волга Электро Сервис ©
Ремонт промышленной электроники
Ремонт электродвигателей
2018-2021
Резольвер принцип работы
Резольверы работают по принципу синусно-косинусного вращающегося трансформатора, сокращённо СКВТ. Упрощённая функциональная схема управления электродвигателем с использованием резольвера в качестве датчика обратной связи, изображена на рисунке ниже:
Связь системы управления (motor controller) с резольвером (resolver) осуществляется при помощи специальной интерфейсной платы (electronics), которая может выполняться как отдельный выносной блок или может быть вмонтированной непосредственно в систему управления.
Конструктивно резольверы могут выполняться как с наличием коллекторного узла для подачи напряжения на “вращающуюся” обмотку ротора, так и без него:
Обмотка Uг ротора связана с обмоткой возбуждения Ue на статоре без применения коллекторного узла, индуктивно, как показано ниже:
Отличия между резольверами и фотоимпульсными датчиками (энкодерами и кодовыми датчиками):
- Энкодеры и кодовые датчики являются оптоэлектрическими приборами, для их питания используется напряжение постоянного тока. Резольверы являются электрическими машинами переменного тока, для питания их обмоток возбуждения используют переменное синусоидальное напряжение.
- Выходные сигналы энкодеров представляют собой две последовательности (“синус” и “косинус”) прямоугольных импульсов одинаковой амплитуды, частота следования которых зависит от скорости вращения вала датчика (если датчик круговой) или движения считывающей головки (если датчик линейный). Путём подсчёта этих импульсов можно вычислять расстояние и (или) скорость, а выполняя слежение за порядком чередования последовательности импульсов по двум каналам (“синус” и “косинус”) можно определять изменения направлений вращения или движения. Выходные сигналы резольверов отличаются от сигналов фотоимпульсных датчиков и представляют собой генерируемую напряжением обмотки возбуждения последовательность синусоидальных и косинусоидальных волновых импульсов аналогового напряжения, при помощи которых можно определять абсолютное положение вала в пределах одного оборота от 0° до 360°. Эти аналоговые сигналы преобразуются в удобную форму интерфейсной платой связи с резольвером и также, как и в случаях с фотоимпульсными датчиками, дают возможность определять расстояние, скорость и направление перемещений.
- В отличие от фотоимпульсных датчиков, в корпусе резольвера не монтируют электронику, так как получаемый от выходных обмоток резольвера уровень и качество сигналов достаточны для их надёжного дистанционного приёма и обработки. Это является одним из основных преимуществ резольверов, так как позволяют расширить температурный диапазон их применения по сравнению с фотоимпульсными датчиками, где есть встроенная электроника.
Принцип работы
Резольверы применяются в приложениях, где требуется очень точное измерение угловых перемещений и скорости, например в сервосистемах и роботах. Выходной сигнал резольвера — это мера углового перемещения, дифференцирование этого сигнала дает угловую скорость.
Резольвер работает на принципе измерения взаимоиндукции между двумя обмотками (рис. 2.5).
Ротор резольвера соединен с вращающимся объектом. На первичную обмотку ротора подается переменное напряжение vref. Статор состоит из двух обмоток, развернутых на 90° друг относительно друга. Напряжение на этих обмотках
соответственно, где θ — угловое положение ротора.
Рис. 2.5. Принцип работы резольвера
Выходные напряжения vо1 и vо2 представляют собой напряжение vref промодулированное величиной угла θ. Используя одно из выходных напряжений, можно однозначно измерить углы лишь в диапазоне 0-90°, оба сигнала позволяют однозначно измерять углы от 0е до 360°.
Выход резольвера есть тригонометрическая функция угла. Но эта нелинейность не всегда является недостатком. Например, при управлении вращающими моментами в роботах требуются именно тригонометрические функции углов поворота. Поэтому выходной сигнал резольвера можно непосредственно использовать для управления без дополнительного преобразования в реальном времени, которое увеличило бы загрузку управляющего контроллера.
Проблемы при работе резольвера могут возникать только из-за щеток ротора (износ, дополнительные шумы и механические нагрузки).
Резольверы широко используют в качестве ДПП в системах управления оборудованием, роботами и манипуляторами.
Совместно с АЦП ВТ разработаны и широко используются прецизионные датчики положения: (12-20) разрядные.
Пример серийно выпускаемого ВТ 100.
Резольверы широко используют в качестве ДПП в системах управления оборудованием, роботами и манипуляторами.
Резольверы Micronor — датчики положения для промышленных и экстремальных применений
Micronor – широко известный в мире производитель оптических и электромеханических датчиков. Одним из направлений производства продукции Micronor являются резольверы. Резольвер (Resolver) – это точный и надежный абсолютный датчик положения, работающий по принципу синусно-косинусного вращающегося трансформатора. Резольверы предназначены для преобразования углового положения ротора, в электрическое напряжение, амплитуда которого, при изменениях угла поворота, чаще всего меняется пропорционально синусу или косинусу угла поворота. Механическое соединение, например, при помощи муфты, вала ротора резольвера с каким-либо другим валом (валом электродвигателя), даёт возможность определять текущее угловое положение последнего, а также получать информацию о скорости вращения и количестве выполненных оборотов. Поэтому резольверы достаточно широко используют в качестве датчиков скорости и положения в приводной технике. 
Рис. 1 Схема обмоток резольвера Связь системы управления с резольвером осуществляется при помощи специальной интерфейсной платы, которая может выполняться как отдельный выносной блок или может быть вмонтированной непосредственно в систему управления. Надежная технология производства резольверов делает этот датчик востребованным в различных отраслях деятельности человека, особенно там, где имеют место тяжёлые условия эксплуатации. Отсутствие электронных компонентов в самом корпусе датчика (резольвера), позволяет применять его в более широких температурных диапазонах, чем например, энкодеры. Наличие полого вала упрощает прокладку кабелей. 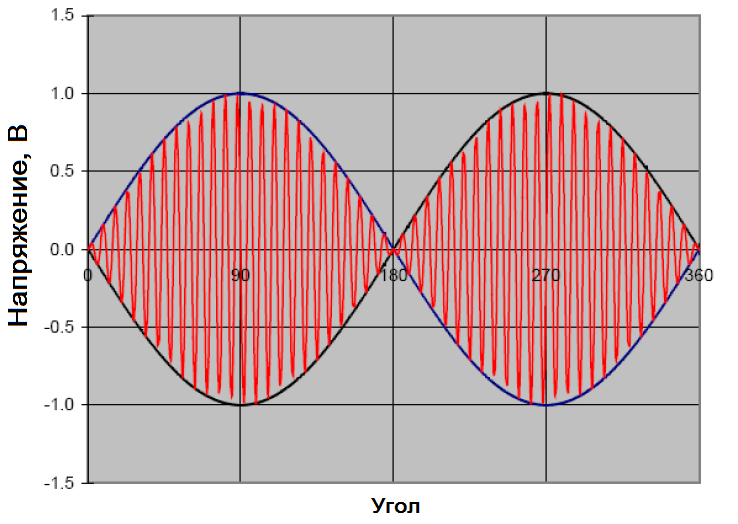
Рис. 2 Пример формирования синусоидального сигнала зависимости изменения напряжения на обмотках статора от угла поворота ротора.
Резольверы с полым валом серии RE
Основные типоразмеры и характеристики серии RE
| Модель | Высота L, мм | Диаметр статора наружный D, мм | Диаметр статора внутренний d1, мм | Диаметр полого вала ротора d2, мм | Максимальная скорость, оборотов в мин. | Точность, угл. мин |
| RE2010 | 18 | 20 | 10 | 4 | 180000 | 60 |
| RE3620 | 20 | 36 | 20 | 10 | 95000 | 60 |
| RE5032 | 20 | 50 | 32 | 20 | 60000 | 60 |
| RE7557 | 22 | 75 | 57 | 46 | 30000 | 60 |

Рис.2 Изображение резольвера серии RE в разрезе
Условия эксплуатации
| -60ºС..+200ºС | 10 9 рад | 20g | 10Гц < f < 500Гц, 10g |
Области применения
- Приводная техника
- Станки c ЧПУ
- Промышленные роботы
- Системы слежения и контроля
- Системы неразрушающего контроля
- Транспорт
Документация
| Техническая документация на RE2010 | |
| Техническая документация на RE3620 | |
| Техническая документация на RE5032 | |
| Техническая документация на RE7557 |
В случае, если необходима дополнительная консультация по продукции, наши технические специалисты постараются помочь вам решить возникшие вопросы. Для этого необходимо связаться с менеджером по продукции Micronor, либо оставить заявку на сайте в разделе Запрос решения.
Датчики положения в нашем каталоге
Резольвер что это такое
Toggle navigation СКБ ИС
+7(812) 334-17-72
Линейные энкодеры
Предназначены для представления линейного перемещения позиционируемого объекта в виде пригодных для последующей обработки сигналов. Мы разработали и выпускаем широкую номенклатуру инкрементных и абсолютных линейных энкодеров. Предназначены для представления линейного перемещения позиционируемого.
Угловые энкодеры
Предназначены для представления углового перемещения позиционируемого объекта в виде пригодных для последующей обработки сигналов. Нами разработаны и выпускаются более 100 моделей угловых энкодеров. Это и прецизионные датчики угла для. Предназначены для представления углового перемещения позиционируемого.
Цифровая индикация, системы управления
Устройства цифровой индикации (УЦИ) для отображения информации о линейном перемещении или повороте измеряемого объекта. Система позиционного программного управления приводами для автоматизации или модернизации различного оборудования. Устройства цифровой индикации (УЦИ) для отображения информации о линейном.
Платы и модули интерфейса
Модули и платы интерфейса, предназначенные для передачи показаний энкодеров на всевозможные контроллеры и ПК, преобразователи сигналов, компьютерные платы для компьютеров, систем ЧПУ и пр. Нашими инженерами разработана широкая гамма. Модули и платы интерфейса, предназначенные для передачи показаний энкодеров на.
Муфты, кабели, принадлежности
Кабели для подключения энкодеров к УЦИ, внешних интерфейсам, контроллерам и другому оборудованию. Муфты для соединения вала углового энкодера с позиционируемым объектом, передающие вращение с минимально возможной погрешностью и сохраняющие. Кабели для подключения энкодеров к УЦИ, внешних интерфейсам, контроллерам и.
Преобразователи перемещения. Общие сведения
Обзор выпускаемой продукции, описание принципа работы линейных и угловых энкодеров СКБ ИС и прочая полезная информация, которая, как мы надеемся, поможет в выборе датчиков, в полной мере удовлетворяющих требованиям Вашей задачи. Обзор выпускаемой продукции, описание принципа работы линейных и угловых.
Программное обеспечение
Выпускаемые нами платы и модули для работы с энкодерами в первую очередь ориентированы на интеграцию в комплексные проекты потребителей и поэтому мы предлагаем интерфейсные библиотеки и примеры работы с ними. Однако, базовую. Выпускаемые нами платы и модули для работы с энкодерами в первую очередь.
Предприятие
Раздел содержащий сведения и материалы о деятельности СКБ ИС. Раздел содержащий сведения и материалы о деятельности СКБ ИС.