4.1.15 Система позиционирования GPS
GPS (Global Positioning System) – это спутниковая система позиционирования. Координата на поверхности земли определяется по времени распространения сигналов от четырех спутников до точки измерения. Разрешение определяется точностями измерения времени и знания координат спутников. Здесь нужно учитывать, что эти спутники не стационарны, траектории их движения варьируются со временем. Неточность знания координат спутников приводит вкладу в погрешность определения координат порядка 2м. Нестабильность работы задающего генератора на спутнике дает вклад в погрешность около 6-7м. Существует и много других источников деградации разрешающей способности. Желательно, чтобы число спутников, доступных одновременно, было даже больше 4, тогда возможно уточнение результата за счет усреднения. Снижение точности характеризуется величиной DOP (Dilution of precision).
Проект GPS стартовал в 1973 под управлением министерства обороны США. Проект полномасштабно заработал в 1994 году. С этого времени стало возможно осуществлять точное наведения ракет на неподвижные, а затем и на подвижные объекты в воздухе и на земле. См. http://ru.wikipedia.org/wiki/GPS, http://en.wikipedia.org/wiki/GLONASS (GLObal NAvigation Satellite System — 2007 г), http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html и http://en.wikipedia.org/wiki/Global_Positioning_System, а также NMEA-0183 sentences analysis tool from the GPS system to increase the positional accuracy.
C 1983 года система GPS стала доступна и для гражданских целей с ограниченным разрешением, а с 2000 года с полным разрешением. Спутники летают на высоте 20200 км и имеют период обращения 11 часов 58 минут (скорость перемещения ~3.874км/с). Наклонение орбиты для всех спутников составляет 550. Спутники вращаются вокруг Земли в шести различных плоскостях. Полное число спутников системы GPS равно 24, что покрывает практически всю поверхность Земли кроме приполярных областей. Для обеспечения большей надежности с марта 2010 года на орбитах размещен 31 спутник. Спутники работают на частотах в диапазонах: L1=1575,42 МГц и L2=1227,60 МГц. Все спутники работают на этих частотах, используя CDMA-мультиплексирование (1.023 млн. чип-кодов в сек.). Каждый GPS-спутник непрерывно передает навигационные сообщения на L1 C/A и L2 P/Y со скоростью 50 бит/с. Передача одного сообщения (37500 бит) занимает 750 секунд. Длина одного кадра составляет 1500 бит. Сообщение содержит также данные о точных координатах спутника, которые обновляются каждые два часа. Точность временной синхронизации GPS составляет ±10 нсек. Абслоютная точность временной шкалы GPS рана 14 нсек.
В настоящее время GPS позволяет определять положение и скорость объектов на поверхности Земли и в ближнем космосе.
Современные GPS-приемники при хорошей доступности спутников обеспечивают точность позиционирования 6-8м. Ожидается, что следующее поколение спутников позволит улучшить измерение примерно в 10 раз за счет использования атомных часов. Специальные системы коррекции при благоприятных условиях позволяют поднять разрешающую способность до 1-2м. Существуют и более изощренные дифференциальные методы коррекции, позволяющие довести разрешение до 10см. Ниже в таблице (данные взяты из источников перечисленных в начале этой статьи)представлены значения основных вкладов в точность позиционирования от различных источников погрешности.
| Источник погрешности | RMS [м] |
| Нестабильность генератора | 6,5 |
| Задержка в бортовой аппаратуре | 1,0 |
| Неопределённость положения спутника | 2,0 |
| Точность знания орбиты спутника | 8,2 |
| Ионосферная задержка | 4,5 |
| Тропосферная задержка | 3,9 |
| Суммарная погрешность, включая вклады от других источников | 13,1 |
Одним из наиболее существенных источников погрешности является ошибка часов приемника. Так погрешность в 1 мсек приводит к ошибке в 300м. Это требует крайне точных и дорогих часов в GPS-приемнике; но производители предпочитают предлагать на рынке недорогие устройства. Эта дилемма разрешается путем введением четвертого спутника.
GPS-приемник принимает сообщения как минимум от четырех доступных спутников, где содержатся показания их часов и идентификаторы. Используя эти данные приемник вычисляет время движения этих сообщений от спутников и их положение в момент отправки.. Обозначим x, y и z – координаты точки измерения и время отправки сообщения как [xi, yi, zi, ti], где индекс i принимает значения 1, 2, 3. N (N≥4). Зная время получения сообщения tr, GPS-приемник вычисляет время распространения сообщения от спутника (tr — ti). Расстояние до спутника в этом случае будет равно pi=(tr — ti)c (с – скорость света).
Время распространения сигнала от спутника задает сферу с центром в спутнике. Если мы измеряем задержки для 4-х спутников, то наше положение находится в области пересечения этих сфер.
К недостаткам позиционирования GPS относится невозможность работы внутри зданий в туннелях и при наличии высоких зданий поблизости.
Рис. 1. Схема реализации позиционирования.
Если бы мы имели достаточно точные часы не только на спутниках A, B и C, но и в приемнике S, то при известных позиция спутников могли вычислить положение S.
Но высокие требования к точности S неизбежно бы привели к серьезному удорожанию GPS-приемника. Такое еще возможно для военных целей, но совершенно не примлемо для гражданских применений.
Разработчики решили использовать четвертый спутник для калибровочных целей, что позволило снять требования высокой точности часов GPS-приемника.
Чем больше спутников, доступных для S вовлекается в расчет координат, тем выше будет получена точность позиционирования. При этом предполагается, что точность положения спутников определена с приемлемой погрешностью.
Какие координаты определяет система позиционирования
Англ.: Рositioning, GPS measurement, GPS surveying
Измерения с помощью спутниковых систем позиционирования с целью определения координат местонахождения объекта в трехмерном земном пространстве. В GPS и ГЛОНАСС (GLONASS) измеряют кодовым или фазовым методами псевдодальности от приемника позиционирования до 4 или большего числа спутников. Существует ряд способов П. Автономное позиционирование (autonomous positioning) — способ определения абсолютных (полных) координат местонахождения пространственной линейной засечкой по измерениям кодовым методом псевдодальностей только с определяемого пункта. Способ чувствителен ко всем источникам погрешностей. На точность влияют нестабильность частот, сдвиги шкал времени и другие аппаратурные погрешности на спутниках и в приемниках позиционирования, погрешности в координатах спутников, внешняя среда — ионосфера, тропосфера, многолучевость. Ионосферные погрешности , или задержки (ionospheric errors) определяются концентрацией электронов, зависят от угла возвышения спутника, географического местонахождения, времени суток, года, активности Солнца, в средних широтах меняются от единиц до десятков метров; их исключают измерениями на двух частотах L1 и L2. В тропосфере, где скорость распространения радиоволн зависит только от метеоусловий, искажения учитывают по моделям стандартной атмосферы. При высотах спутников над горизонтом менее 10о наблюдений не производят, т.к. тропосферные погрешности , или задержки (tropospheric errors) превышают 10 м. К антенне приходят радиолучи непосредственно от спутника, а также отраженные от земной поверхности, зданий, других объектов, возникшие из-за дифракции, и дополнительно искажают дальности; это явление называют многолучевостью , или многопутностью (multipath). К понижению точности ведут режимы SA и AS. Точность координат зависит от геометрического фактора засечки (см. GDOP, HDOP, HTDOP, PDOP, VDOP, TDOP). Точность определения координат около 10 100 м. Дифференциальное позиционирование (differential positioning, DGPS, DGLONASS) — псевдодальности измеряют одновременно с двух пунктов: базовой станции , или референц-станции (base station, reference station, DIRES), расположенной на пункте с известными координатами, и подвижной станции (rover station), стоящей над новой точкой; на базовой станции измеренные расстояния сравнивают с вычисленными по координатам и определяют их разности — дифференциальные поправки (differential corrections), которые передают на подвижную станцию в реальном времени или учитывают в ходе вычислений координат после измерений ( постобработки — postprocessing). Точность координат около 1 5 м, при аппаратуре повышенной точности и специальном программном обеспечении — около 1 3 дм. Статическое позиционирование , или статика (statics) — способ относительных (relative, baselines) измерений, когда фазовым методом по продолжительным (около часа и дольше) наблюдениям определяют приращения координат между базовой и подвижной станциями, иначе — вектор между этими станциями. Чтобы ослабить влияния погрешностей, в ходе обработки из результатов фазовых измерений формируют разности: первые (простые) разности (single-difference, SD) — из измерений с базовой и с определяемой станций на один и тот же спутник, вторые (сдвоенные) разности (double-difference, DD) — из первых разностей измерений на разные спутники и третьи (строенные) разности (triple-difference, TD) — из вторых разностей разных эпох наблюдений. Вторые и третьи разности практически свободны от большинства погрешностей. Обработкой их по методу наименьших квад квадратов вычисляют вектор между станциями, а затем координаты подвижной станции. Комбинируя частоты L1 и L2, образуют ионосферно-свободную волну (ionosphere-free wave), длина 5,4 см, из строгого соотношения этих частот; разностную волну (wide-lane wave), длина 86,2 см, из разности указанных частот; суммарную волну (narrow-lane wave), длина 10,7 см, из суммы частот. Измерения обрабатывают на всех волнах и отбирают оптимальный результат. Ускоренная статика (fast statics) — разновидность статики, в которой для разрешения неоднозначности применяют стратегии поиска, не требующие продолжительных наблюдений, продолжительность же измерений согласована с числом наблюдаемых спутников и уменьшается при его увеличении; способ хуже защищен от многолучевости. Псевдостатика (pseudostatics) — разновидность статики, когда непрерывность измерений сохраняется только на базовой станции; на подвижной станции измерения выполняют лишь в начале и в конце часового интервала. Точность положения в плане около (5 10) мм + (1 2) ppm от длины вектора; точность положения по высоте в 2 3 раза ниже. Способы кинематики (kinematics) — разновидности относительных измерений, выполняемых обычно фазовым методом, позволяющие измерять вектор между базовой и подвижной станциями за короткое время. Предварительно определяют координаты базового и подвижного приемников статическим П. , другими способами, или приемники позиционирования устанавливают на пунктах, координаты которых известны с точностью до нескольких см. На известном векторе выполняют измерения до 4 или большего числа спутников и образуют однозначные вторые фазовые разности. После этого, не прерывая измерений, приемник перемещают на следующий определяемый пункт. Важно, чтобы измерения велись непрерывно по одним и тем же спутникам. По известным координатам базовой станции и непрерывным измерениям сначала вычисляют вектор до новой станции, а затем и ее координаты. Далее приемник перемещают на следующий пункт. Различают разновидности кинематики: непрерывная кинематика (continuous kinematics) — способ П. , при котором не останавливаясь перемещаются с приемником по контуру и через заданные интервалы времени фиксируют его координаты, обработка после измерений; способ «стой и иди» («stop and go») — способ П. , предусматривающий возможность остановиться на точке, выполнить более длительные измерения, а затем продолжить движение, обработка после измерений; кинематика реального времени (real time kinematics, RTK) — способ П. , когда при помощи дополнительного цифрового канала данные с базового приемника передают на подвижный и обработка ведется в ходе измерений. Точность кинематики несколько ниже точности статики.
Глобальная Система Позиционирования — GPS
До недавнего времени для определения своего местоположения не существовало ни одного удобного и универсального способа. Появление Глобальной Системы Позиционирования (GPS) произвело кардинальное изменение.
Сегодня в любой точке на Земле и в околоземном пространстве, в любое время суток прибор GPS обеспечивает решение любых задач, требующих определения местоположения и параметров движения.
Система GPS, созданная США за 12 млрд. долл., состоит из 24 космических спутников и сети специальных наземных станций слежения, обеспечивающих регулярное определение параметров движения спутников и коррекцию бортовой информации об их орбитах.
Космические спутники непрерывно передают радиосигналы, создавая тем самым вокруг земного шара «информационное поле». GPS-приемник улавливает сигналы и путем измерения дальностей до нескольких космических спутников определяет координаты. При этом спутники играют роль прецизионных опорных точек. Расстояние до спутника определяется путем измерения времени прохождения радиосигнала от спутника до GPS-приемника.
Кроме определения трех текущих координат (долгота, широта и высота над уровнем моря) GPS обеспечивает:
- определение трех составляющих скорости объекта;
- определение точного времени с точностью не менее 0,1 с;
- вычисление истинного путевого угла объекта;
- прием и обработку вспомогательной информации.
Сегодня эксплуатируется спутниковая навигационная система (СНС) NAVSTAR, развернутая Министерством обороны США и введенная в эксплуатацию в 1988 году. Эксплуатацию этой СНС, включая сеть контрольных станций, ведет МО США. Но ею разрешено пользоваться бесплатно всем гражданским организациям, правда, только с ограничением по точности определения координат (так называемый селективный доступ). Это обеспечивается путем зашумления радионавигационного сигнала используемого для измерений. Для точных измерений используется специальный дифференциальный метод.
Применение приборов спутникового позиционирования в прикладных задачах и ГИС
Число областей применения GPS-средств велико. Их можно систематизировать по содержанию основных задач.
Землеустроительные задачи, картография и координирование строительных объектов относятся к такой группе приложений, как измерение Земли и ее поверхности. Здесь могут использоваться не только отдельные приемники, но и целые измерительно-вычислительные комплексы, точность измерений которыми доходит до долей сантиметра.
На основе сочетания возможностей GPS и других технических средств создаются информационно-измерительные системы, позволяющие получать новые качества в решении старых задач.
GPS-приемник становится миниатюрным и дешевым и, вероятно, в ближайшее время может стать новым «бытовым прибором», таким же привычным, как телефон.
GPS позволяет «присвоить» уникальный адрес буквально каждому квадратному метру поверхности Земли, а это означает, что человек престанет теряться и метаться в поисках нужного объекта.
Области применения GPS-средств в дорожном хозяйстве
В зависимости от точности необходимых данных, использование GPS в дорожном хозяйстве может вестись в следующих направлениях: навигация, топография, геодезические работы.
Использование GPS-оборудования для навигации
Традиционно первой является область навигации подвижных объектов. Ей соответствуют GPS-приемники навигационного класса, определяющие местоположение с погрешностью не хуже нескольких десятков метров. За исключением специальных задач, это — очень высокая точность навигации. Эти приемники используются на автомобилях, речных, морских и воздушных судах, на космических аппаратах и при перемещениях пешком. Общим для всех подвижных объектов является наличие скорости их движения по отношению к земной поверхности и традиционный набор штурманских задач. Прежде, чем начать движение по маршруту, т.е. подняться в воздух, отплыть из гавани или отправиться в путь на автомобиле, штурман экипажа осуществляет детальную проработку предстоящего маршрута. Он делает прокладку маршрута по карте, определяет все контрольные путевые точки, проводит расчет необходимой скорости движения и графика ее изменения по различным отрезкам пути, расчет продолжительности движения и времени прибытия, запаса горючего. А так же определяет многие другие элементы предстоящего маршрута, которые он будет контролировать и корректировать в процессе полета, плавания или поездки.
Помимо указанных выше основных задач современные GPS-приемники навигационного класса в полуавтоматическом режиме выполняют также всю штурманскую работу, как по «предполетной подготовке», так и в «полете». В зависимости от назначения приемника его встроенный компьютер решает значительное количество сервисных задач. Таких, как:
» хранение и выдача информации об условиях навигации самолетов и судов кораблей в окрестностях мировых морских портов и аэропортов (обновляемые магнитные карты);
» связь по стандартным интерфейсам с внешним оборудованием и вычислительными средствами и, в частности, работа в среде различных навигационных и информационных комплексов;
» накопление во внутренней памяти приемника массивов данных измерений для проведения различного рода статистических обработок;
» выполнение значительного количества вспомогательных операций, обеспечивающих оперативный контроль за работой систем приемника в меняющихся условиях приема спутниковых сигналов;
» дружественный интерфейс с оператором.
Наличие скорости движения накладывает ряд специфических требований, которые учитываются при схемном проектировании приемников. Например, навигационные приемники авиационного назначения должны быть достаточно быстродействующими, чтобы не отставать в определении текущих координат и скорости от самого объекта и не создавать дополнительных «динамических» погрешностей.
Естественно, что объекты различаются по диапазонам скоростей движения и интенсивности маневров. А их штурманам необходим несколько различный набор сервисных задач. Поэтому разрабатываются и находят широкое применение штурманские GPS-приемники для самолетов и вертолетов, кораблей и наземного транспорта. С их применением безопасность движения и достоверность и точность решения навигационных задач существенно возрастают.
Для региональных съемок мелких и средних масштабов (1:100 000, 1:50 000), движения по заданным маршрутам и поиска пунктов в режиме навигации подвижных объектов (самолеты, корабли, космические аппараты, автомобили и т.д.) предназначен специальный класс портативных GPS приемников.
Точность пространственных координат, получаемых почти сразу после включения, составляет около 100 метров, а со специальной функцией осреднения результатов в неподвижном положении повышается до 30 метров.
Оператору достаточно нажать кнопку включения и последовательно выводить на экран или текущие координаты в выбранной системе, или навигационную информацию для выхода на любую из путевых точек в различных маршрутах, которые можно задать заранее с карты или из каталога. При этом можно выводить на экран азимуты и расстояния до них, а также курсовые отклонения и даже расчетное время прибытия.
Использование GPS-оборудования для топографии (приборы дециметрового-метрового уровня точности)
Для сбора точных ГИС данных и картографических работ среднего класса точности предназначено оборудование дециметрового-метрового уровня точности. Использование новейших GPS технологий в сочетании с мощными накопителями данных и программным обеспечением позволяет получать точные результаты съемки, которые эффективно используются при геофизических и гидрографических изысканиях, в дорожном строительстве, при прокладке и обследовании коммуникаций, в лесном и сельском хозяйстве, для создания и обновления ГИС.
С помощью топографических GPS-приборов обеспечивается точность определения координат объектов в диапазоне от 5 метров до 30 сантиметров каждую секунду измерений даже в движении, что позволяет существенно увеличить число точек съемки при создании карт в масштабе от 1:2000 и мельче. При ответственных работах используется специальный режим повышенной точности. Кроме трехмерных координат GPS-приемники позволяют сохранять и развернутые описания объектов съемки из заранее подготовленных словарей. Координаты объектов можно получать как в принятых Государственных Системах, так и в любых местных системах координат.
При оснащении комплекта GPS-приборов специальным радиоканалом для передачи поправок высокая точность съемки становится возможной и в реальном масштабе времени. Это позволяет решать задачи по выносу объектов в натуру, выполнить точную навигацию или поиск пунктов. С помощью ГИС или информационной программы эту работу можно выполнить наглядно сразу на экране компьютера по электронным картам-подложкам.
Использование GPS геодезического класса (миллиметровый-сантиметровый уровень точности)
Весьма обширной областью применения GPS-средств и методов является ЗЕМЛЕМЕРИЕ в самом широком понимании этого слова.
В настоящее время GPS приемники этого класса получили сертификаты Госстандарта и широко используются в геодезии, геофизике, для топографии и земельного кадастра, для выноса проектов в натуру, при геодинамических и гидрографических исследованиях.
Важнейшей особенностью подавляющего большинства этих проблем является требование исключительной точности определения координат, моментов времени и временных интервалов. Здесь счет погрешностям идет на доли метра и доли сантиметра при измеряемых расстояниях в десятки километров.
Наиболее мощные приемники геодезического класса представляют собой не отдельные приемники, а целые измерительно-вычислительные станции и комплексы. Они снабжены и линиями радиосвязи, и внешними компьютерами, и разветвленными программами постпроцессорной, так называемой камеральной обработки данных, накопленных во время полевых измерений.
Геоинформационные системы и управление ресурсами
В связи с растущей стоимостью земли и потребностью в соответствующих природных ресурсах, большие надежды возлагаются на специалистов, решения которых позволят лучше организовать управление этими средствами. Такие инструменты, как компьютерные Геоинформационные Системы и системы управления ресурсами обеспечивают механизм записи, хранения и поиска больших объемов географических данных.
Однако, до тех пор, пока этот обширный объем связанной с землей информации не будет основан на единой исходной системе координат, он может оказаться бесполезным, так как отдельные части не будут сочетаться одна с другой. Любая информация, которая относится к положению объекта в реальном мире, является, по существу, географической. Необходимо задать общую географическую основу, на которой может базироваться информация о местоположении объектов и связать ее с информацией различных типов (т.е. данные о владении землей, о природных ресурсах и политических границах).
GPS оказывается наиболее эффективным, точным и дешевым средством создания такой основы. Любой из широко распространенных методов GPS съемки можно использовать для своевременного создания и обслуживания данных в географически привязанной базе данных, такой как ГИС.
Системы глобального позиционирования и их совершенствование

Одной из основных составляющих технологии дифференцированного применения удобрений является система позиционирования, а основным элементом ее служит приемник сигналов GPS. Применение GPS позволяет товаропроизводителям точно, автоматизировано в реальном масштабе времени определять координаты при отборе проб, вносить удобрения на отдельные участки поля, составлять карты урожайности, определять границы поля, точное местоположение сорняков, вредителей растений, рельеф местности. В большинстве случаев достаточно знание координат на плоскости — х и у. Для более сложных операций может понадобиться знание и z- координаты.
Системы позиционирования можно в зависимости от требований к точности подразделить на 4 класса (таблица 1).
Таблица 1. Требования к точности систем позиционирования
- Управление агрегатами
- Контроль перекрытия смежных проходов при внесении удобрений и комбайновой уборке с.-х. культур
Спутниковые навигационные системы
В результате создания в конце 1980-х годов спутниковой навигационной системы (GPS- NAVSTAR в США и ГЛОНАСС — в России) в настоящее время военные и гражданские лица имеют свободный доступ к этой системе для определения координат своего местонахождения независимо от времени суток и природно-климатических условий. Наиболее широкое применение в точном земледелии получила система GPS [3, 4, 5].
Система позиционирования ГЛОНАСС пока используется ограниченным контингентом (в геодезии, картографии и т.д.). Система GPS модифицирована для позиционирования гражданских наземных, морских и воздушных транспортных средств, в том числе и объектов с.-х. назначения. На ранних стадиях разработки системы позиционирования характеризовались низкой надежностью для динамического позиционирования объектов в пределах поля. Разрешающая способность позиционирования мобильных агрегатов составляла 5 м и была явно недостаточной. Ошибка распределения Гаусса превышала 10 м. Малое количество спутников усугубляло эту проблему, при этом на точность позиционирования оказывали влияние деревья и здания. Существенно уменьшали точность позиционирования многократные отражения сигналов от самих объектов позиционирования. Приемники систем позиционирования были громоздкими и дорогими.
Сравнительные характеристики систем GPS- NAVSTAR и ГЛОНАСС представлены в таблице 2.
Таблица 2. Характеристики систем позиционирования GPS — NAVSTAR и ГЛОНАСС
Навигационная система для определения времени и расстояния
Глобальная навигационная спутниковая система
Министерство обороны США
Министерство обороны России
Приблизительная точность для гражданских целей
*С преднамеренным искажением.
В 2000 г. GPS значительно повысила свою точность, а стоимость приёмников существенно снизилась. В настоящее время 12-канальный приемник GPS можно приобрести менее чем за 100$ США. Приемники GPS получают сигналы от 8 до 12 спутников, находящихся над горизонтом. Типичный пример приемника сигналов GPS — Trimble Ag.
Европейским Союзом финансируется Европейская навигационная спутниковая система (GNSS). Полнооперационное ее применение планируется в 2008 г. Эта система улучшит точность и надежность позиционирования по сравнению с GPS.
Каждая из систем GPS и ГЛОНАСС состоит из трех сегментов (рисунок 1).
- Сегмент мониторинга и контроля. Он осуществляет всеобщий контроль и управление системой и принадлежит владельцу системы.
- Космический сегмент состоит из навигационных спутников (в настоящий момент их 24) с жизненным циклом около 7 лет, организованных в блоки одинаковой конфигурации и назначения.
- Сегмент пользователей на суше, море и околоземном пространстве с неограниченным числом приемников сигналов.
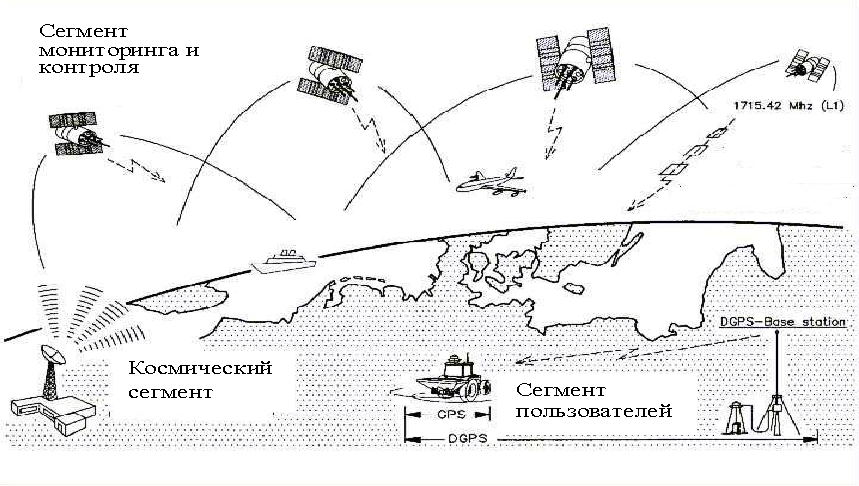
Рис. 1. Структура спутниковой навигационной системы
Местоположение приемников сигналов GPS или ГЛОНАСС определяется при помощи сигналов от не менее чем трех спутников. Координаты приемника сигналов определяются на основании информации о положении конкретного спутника и расстояния между спутниками и приемником сигналов.
Системы GPS или ГЛОНАСС дают погрешности, обусловленные атмосферными эффектами и пространственной конфигурацией спутников в данный момент времени [9, 10]. Кроме этого в системе GPS преднамеренно были внесены искажения сигналов для гражданских пользователей. В связи с этим точность позиционирования составляет ±100 м. Для повышения точности позиционирования используют дополнительный стационарный приемник сигналов с известными координатами (базовая станция DGPS).
Дополнительный приемник сигналов сравнивает сигналы GPS с известными координатами с целью определения величины погрешности. Учитывая, что та же погрешность имеет место и для приемников сигналов GPS с неизвестными координатами (искаженными), они могут быть легко исправлены.
Корректировка сигналов в реальном масштабе времени необходима при выполнении таких с.-х. работ, как внесение удобрений, применение химических средств защиты растений. Корректирующий сигнал передается со стационарной станции на движущийся объект (с.-х. машину или агрегат).
Спутниковый сегмент состоит из созвездия функционирующих в данную эпоху спутников. Сегмент управления и контроля содержит главную станцию управления и контроля, станции слежения за спутниками и станции закладки информации в бортовые компьютеры спутников. Сегмент пользователя — это совокупность спутниковых приемников, находящихся в распоряжении пользователей. Пользователя системы в первую очередь интересует его собственный сегмент, то есть имеющиеся у него приемники, а также спутниковый сегмент, в значительной мере обеспечивающий достоверность результатов. Вместе с тем действия сегмента управления и контроля иногда оказывают критическое влияние на полученные пользователем результаты. Пользователь не может контролировать систему и воздействовать на нее, но он обязан выявлять сбои в ее работе и на этапе обработки отсекать соответствующие результаты.
Спутниковый сегмент. Номинально в каждую эпоху имеется 24 работающих (здоровых — healthy) спутника системы. Спутники распределены по шести круговым орбитам. На каждой орбите, таким образом, находится 4 спутника. Плоскости орбит разнесены по прямому восхождению на 60º.

Наклон плоскости орбиты к плоскости экватора составляет 53 градуса. Именно таков угол наклона i на рисунке 2 для спутников GPS. Расстояние спутников от поверхности Земли составляет 20200 километров. При этом период обращения равен половине звездных суток. Наблюдателю это удобно. Если сегодня оказалось, что в такой-то интервал времени спутник занимал такое-то видимое с данного пункта положение, то завтра примерно в тот же интервал времени это повторится. Повторится и геометрия наблюдений, то есть PDOP. Следовательно, можно планировать наблюдения на несколько суток вперед с точностью до нескольких минут. Помешать этому может только резкая корректировка орбит спутников или переход какого-либо из них из состояния здорового в состояние больного (unhealthy) или наоборот.
Сегмент управления и контроля. Этот сегмент называют также операционной системой управления и контроля — Operational Control System (OCS). Основными задачами сегмента является слежение за спутниками для определения их орбит и поправок часов спутников относительно GPST, прогноз эфемерид спутников, временная синхронизация спутников, загрузка информационного сообщения на спутники. Существует также много других задач, таких, например, как обеспечение запусков новых спутников.
Сеть из пяти станций используют для создания широковещательных эфемерид и для определения параметров хода часов спутников. Именно эту информацию пользователь получает из спутникового сообщения. Более точную информацию, но с запаздыванием, получают из результатов наблюдений спутников на контрольных пунктах других сетей. Гораздо более глобальная и точная сеть — это Кооперативная международная сеть GPS — Cooperative International GPS Network (CIGNET), управляемая национальной геодезической службой (NGS) США. Координаты станций этой сети определены методом РСДБ. Полученные на этой сети эфемериды спутников называют точными. Они доступны, например, через INTERNET. Подчеркнем еще раз, что получить их можно только по прошествии некоторого времени после наблюдений. Следовательно, их используют, когда нужна наивысшая точность результатов, а задержка в их получении особой роли не играет.
Сегмент пользователя. Пользователь GPS — это человек или коллектив, имеющий в своем распоряжении всю необходимую для работы спутниковую аппаратуру. Следовательно, сегмент пользователя — это совокупность находящихся в работе спутниковых приемников и другой аппаратуры. Пользователи различаются на категории по нескольким признакам: гражданские и военные, навигаторы и геодезисты, имеющие полный допуск к системе и имеющие ограниченный допуск. Как правило, американские военные и представители американских спецслужб имеют полный доступ к системе. Таких пользователей называют авторизованными, допущенными, уполномоченными — authorized users. Остальные пользователи, как правило, гражданские, — это неавторизованные — unauthorized — пользователи. Аппаратура авторизованных пользователей позволяет получать и обрабатывать информацию такой точности, на которую только способна система. Аппаратура неавторизованных пользователей, не имея соответствующего чипа, способна получать только информацию с намеренно загрубленной точностью. Специалисты в области навигации как пользователи GPS заинтересованы в решении задач навигации. Эти задачи в значительной мере сводятся к определению координат транспортного средства и к определению скорости и направления его перемещения. Резко возрастают точностные требования, до дециметрового уровня, при подходе к портам, при маневрах в узкостях (проливы, фьорды) и в потоке движения. На самом деле навигационные приемники определяют не только местоположение и вектор скорости. Приемник указывает требуемый и реальный курс на заданный объект, отклонение от маршрута, предписывает маневры, желательные для возвращения на курс. Вообще навигационный приемник многофункционален.
Совершенствование систем глобального позиционирования
Для повышения эффективности применения систем глобального позиционирования ученые проводят исследования в направлении повышения точности определения координат, надежности, расширения сфер применения. Точность приемников сигналов GPS зависит от следующих факторов:
- правильности установки;
- используемой технологии изготовления приемников;
- погрешности, обусловленной несовершенством спутниковых систем;
- состояния атмосферы;
- точности дифференцированного сигнала в случае DGPS.
Проводятся исследования по расширению сферы применения GPS, универсализации, снижению стоимости. Точность определения координат с помощью GPS зависит от цены приемника. Она изменяется от 100 до 10000 $ США. Дешевые приемники (от 100 до 500 $ США) могут быть использованы для определения координат размещения сорняков. Точность таких приемников около 10-15 м по горизонтали. Цена приемников, используемых для дифференцированного внесения удобрений, обеспечения стыковки смежных проходов, может меняться от 1500 до 5000 $ США.
Ведутся исследования по использованию приемников GPS для вождения агрегатов для внесения удобрений и применения средств защиты растений по заданному курсу. Установлено, что GPS обеспечивает более надежную стыковку смежных проходов. Если при использовании пенных маркеров около 10% площади остается неудобренной или переудобренной, то при использовании GPS только 5%. При вождении агрегата опытным оператором погрешность составляет около 1,5%. Имеется и много других преимуществ нового способа вождения (способность выполнять операции в ночное время, вождение машин-удобрителей с центробежными дисками, осуществление подкормки посевов).
Г. И. Личман, д. т. н., зав. лаб. (ГНУ ВИМ)
А.И. Беленков д. с.-х. н, профессор, РГАУ-МСХА имени К.А. Тимирязева
Журнал «Нивы Зауралья» №10 (121), ноябрь 2014